Workshop: circuit design for fabrication (PNCA 29Nov09 1-5pm $35)
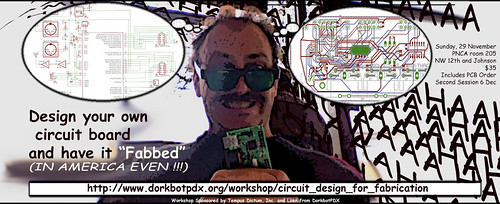
As many of you may be aware Laen has been putting together a group ordering process for circuit board fabrications somewhat like SparkFun’s BatchPCB service except with less time lag and the fabrication is done in the USA.