Foobarred is Normal
Recently I started using my linux laptop as my primary avr-usb development environment. When I upgraded the laptop to the current Ubuntu-LTS release (10.4 aka Lucid lynx) a bunch of stuff was broken including all of the wonderful udev rules provided by my linux savvy friends at dorkbotpdx.
I mean jeesh even lsusb was broken.
$ lsusb -vd "03eb:"|grep iM
cannot read device status, Operation not permitted (1)
iManufacturer 1
When I started looking at what changed and how to adjust, the web dead ended to a lot of threads like the one at http://ubuntuforums.org/showthread.php?t=1360412 ; where two people declared that having to escalate privileges to root in order to talk to a user device was “normal”. Even when the developer said it wasn’t normal the ubuntu folk redeclared it normal (apparently after Bush you just have to repeat something blatantly stupid for it to be true). As an administrator the last thing you want is everything and its dog requiring root privileges.
Hanging around the #ubuntu channel was a lot like having people repeat the searches on the web that provided me with the same dead ends that I joined the channel trying to resolve.
Cherchez la femme (look at the squeeze)
This was getting stupid. All I wanted to do was to have devices that I could plug in and program and then communicate with them using ruby or perl or some other haphazzardly thrown together scripts without having to be root. Then I realized once again that ubuntu is really focused on making the users life easier and that this leads to a lot of non technical help. So I asked my friends what the nick name was for the Debian release that was the basis for the Ubuntu release nick named “Lucid” and then re did all of my dead ended web queries replacing “Ubuntu Lucid” with “Debian Squeeze”.
The results were heavy on the technical detail and light on social skills.
More importantly I quickly found the solution that I needed in the middle of this link (http://git.zerfleddert.de/cgi-bin/gitweb.cgi/usb-driver?a=blob_plain&f=README&hb=HEAD) what I was missing was the difference between the new and the old udev rules.
“If you are running a newer version of udev (as in Debian Squeeze and
Ubuntu 9.10), you need to adapt the rules-file to the new udev-version:
sed -i -e ‘s/TEMPNODE/tempnode/’ -e ‘s/SYSFS/ATTRS/g’ -e ‘s/BUS/SUBSYSTEMS/’
/etc/udev/rules.d/xusbdfwu.rules”
One line of sed was all I needed and it had taken me a week of asking about lucid when i should have been asking about squeeze. With this I also was able to find the changes to the lay out of the /dev and /proc trees and the new tools to monitor udev and diagnose issues.
All-Your-Atmel-Belong to Us
I really just wanted to change the permissions so I could use my devices. Adding the following udev rule to your system will do just that. You will also need to restart the udev service. Both of these will require you to be root.
# cat >/etc/udev/rules.d/98-all-your-atmel-belong-to-us.rules<<EOF
#------------------------/etc/udev/rules.d/98-all-your-atmel-belong-to-us.rules
#
# Make atmel devices (dfu, LUFA, obdev) accessible in userland
#
ACTION=="add", SUBSYSTEMS=="usb", ATTRS{idVendor}=="03eb", MODE="0666"
EOF
# service udev restart
To actually own all my atmel I could have also added ‘ ,USER=”don” ‘ after the mode part but I just wanted to talk my Atmel usb-avr devices and the open source firmware I was developing. And the above rule made things “just work”.
$ lsusb -vd "03eb:"|grep iM
iManufacturer 1 mycompany.com
$
This rule fixed all of my LUFA based devices including the my open source arduino programmer as well as the dfu programmer.used to code them. Hopefully it will be a while before I have to go through this again.
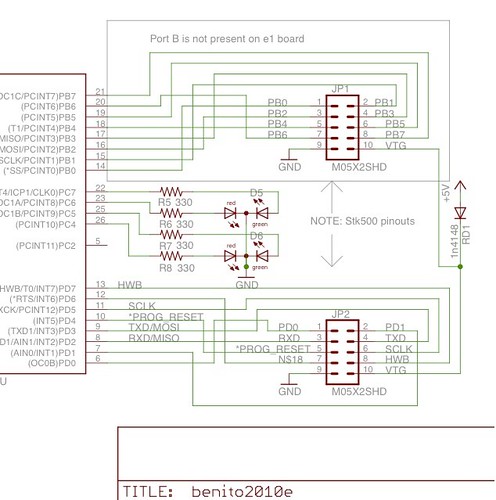
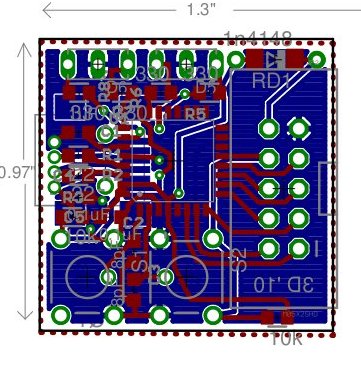
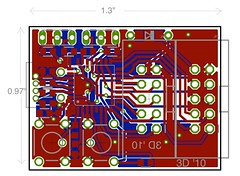
 One of the benefits of having laens pcb order available is that I can test design changes iteratively and explore other possibilities. The benitos i am using in the induction this month are the result of three iterative changes based on the original Benito and a redesign done by Monty Goodson a few years back. They (the benito2010d) will be the last of the design to use the pinouts of the origional benito. Fot the end users the biggest change will be that the cable will be a mini-b like the one used on the teensy.
One of the benefits of having laens pcb order available is that I can test design changes iteratively and explore other possibilities. The benitos i am using in the induction this month are the result of three iterative changes based on the original Benito and a redesign done by Monty Goodson a few years back. They (the benito2010d) will be the last of the design to use the pinouts of the origional benito. Fot the end users the biggest change will be that the cable will be a mini-b like the one used on the teensy.